
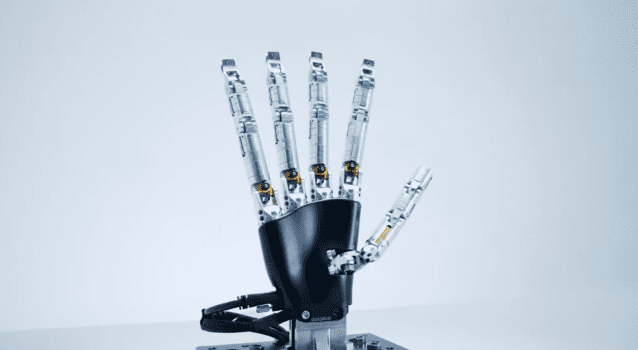

WUJI Hand
The WUJI Hand by WUJI TECH is a human-sized, high-dexterity robotic hand built for real-world manipulation.
With 20 active DoF (4 per finger), self-locking direct-drive micro-joints, and 1 kHz control across 20 axes,
it combines fine, uncoupled finger motion with practical strength (up to 10 kg static grasp and 15 N fingertip force).
Dexterity20 DoF • 5 fingers • serial kinematics
Weight580 ± 10 g (without cable)
Strength15 N fingertip • 10 kg static grasp
Control1000 Hz × 20 axes • USB / EtherCAT