Simulation is rapidly becoming a cornerstone of robotics research, especially for humanoid agents, where real-world data collection is slow, risky, and expensive. NVIDIA Isaac Sim, part of the broader Isaac ecosystem, offers a GPU-accelerated, high-fidelity simulation platform that integrates perception, physics, control, and learning in one extensible framework. The source code is available on GitHub at https://github.com/isaac-sim
What Is Isaac Sim?
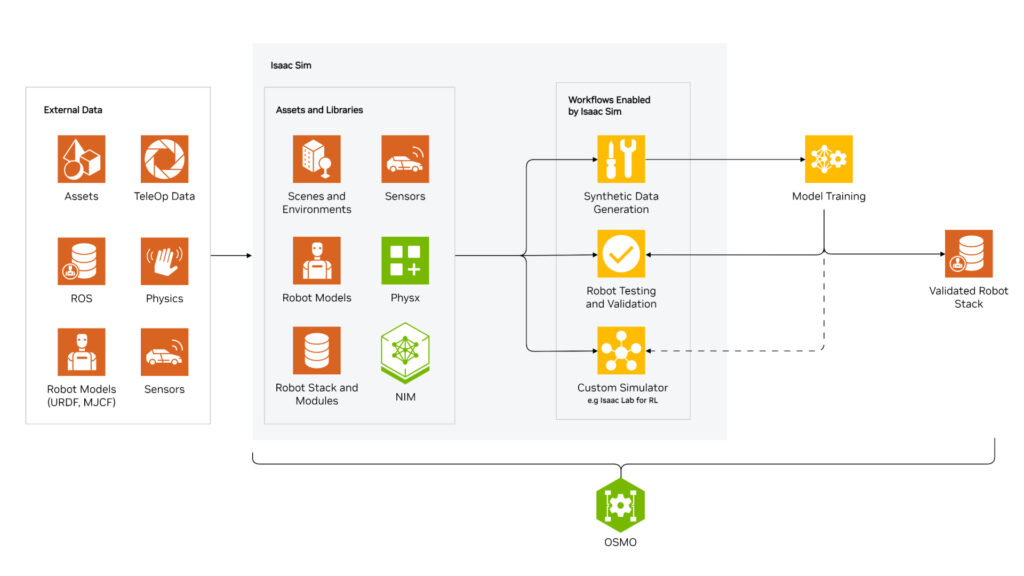
At its core, Isaac Sim is an open-source simulation platform built on NVIDIA Omniverse, enabling researchers and engineers to design, simulate, train, and validate AI-driven robots in physically accurate virtual environments. It supports high-fidelity physics via NVIDIA’s PhysX engine, RTX-accelerated sensor simulation including cameras, LiDARs, and IMUs, as well as robust ROS and ROS2 bridging for software-in-the-loop workflows. Isaac Sim also provides tools for synthetic data generation to support perception model training and is compatible with reinforcement learning and policy training workflows.
Isaac Sim is more than a visualizer; it is a research instrument for contemporary robot learning and control. Its GPU-native parallelism allows faster iterations and training cycles compared to traditional CPU-bound simulators.
Where Isaac Sim Fits in the Research Pipeline
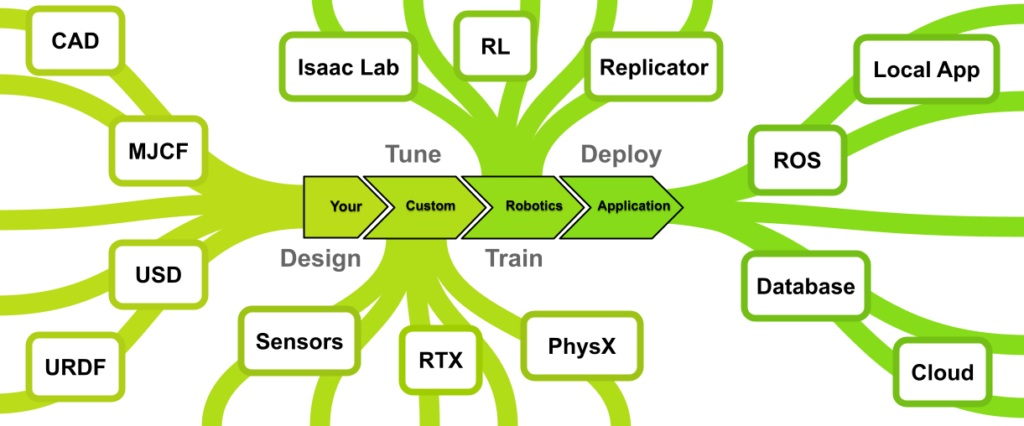
The Isaac Lab framework, built on top of Isaac Sim, unifies reinforcement learning, imitation learning, and motion learning. It provides diverse robot platforms, including humanoids, environment definitions and benchmark tasks, interfaces to popular reinforcement learning frameworks, and distributed training support. It also includes sim-to-real tools to facilitate transferring learned policies from simulation to physical robots. The GitHub repository for Isaac Lab can be found at https://github.com/isaac-sim/IsaacLab
Best Practices for Researchers
Integrating ROS2 early in your workflow is recommended, as Isaac Sim’s ROS Bridge allows full software stacks to be tested in simulation, which is critical for humanoid control research. Synthetic data generation using the Replicator and sensor pipelines can validate perception models with diverse, photorealistic datasets before deploying to real sensors. GPU-accelerated policy training significantly shortens research cycles compared to CPU-bound simulators. Using standardized benchmark tasks and frameworks like Orbit or InfiniteWorld helps ensure reproducibility and comparability across research projects.
For humanoid robotics researchers, Isaac Sim and Isaac Lab provide a cohesive, scalable, and extensible simulation ecosystem that addresses the most pressing needs of modern robotics: high-fidelity physics, efficient policy training, sensor realism, and sim-to-real workflows. Whether developing whole-body control, vision-guided behaviors, or reinforcement learning agents, Isaac Sim offers the infrastructure to accelerate experiments and improve reproducibility across labs. Researchers can start exploring Isaac Sim and Isaac Lab through the official GitHub repositories and leverage the referenced papers to ground their work in state-of-the-art practices.